Kyle Hess - Huntsville, AL
Quick Balancing Cube (QB3)
A cubic robot that uses the conservation of angular momentum (counter-torque) to balance an unstable system. A controls capstone group project.
Design
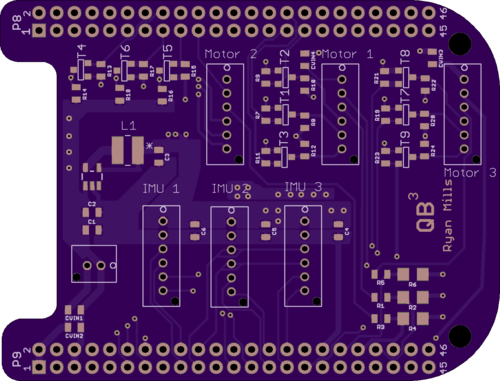
The initial design of QB3 called for the cube to balance on one of its corners using three motors/flywheels turning on perpendicular axes. Unfortunately, due to hardware problems and time constraints, we were forced to simplify the design to balancing on a single edge of the cube. This only requires the use of one motor/flywheel combination (and a single motor driver). The entire system was controlled with a BeagleBone Green Wireless, with a BNO055 IMU for angular position measurements. The BeagleBone then generates a PWM signal based on the control algorithm to send to the DF45 driver board and control the torque of the motor. Ideally, we would have designed an LQR control algorithm, but due to time constraints we opted for a simpler PID control loop.

Components
-BeagleBone Green Wireless
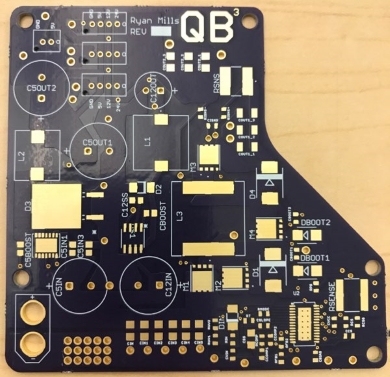
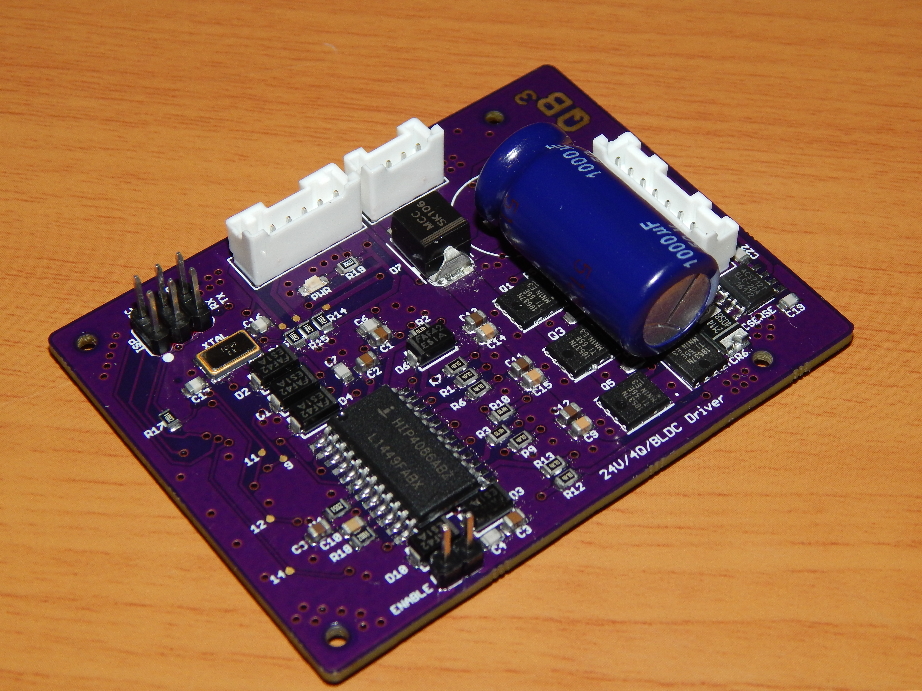
-DF45 BLDC Motor Driver
-High-Inertia Brass Flywheels
-Acrylic frame
-3D Printed Motor Mounts
-6S 1550mAh LiPo battery
View Report
Components
Video
Specifications
-Operates on 24V max
-Current spikes up to 8A
-Flywheel inertia of 8.7E-04 Kg*m2
-Programmed and commanded via WiFi
-Relies on Adafruit Libraries
-Programmed with Python
Future Improvements
Design and implement LQR control. Revise motor driver and power distribution boards.